实验九. 基于IIC接口的ADXL345三轴加速度开发实验
实验目的
- 了解IIC驱动;
- 掌握Android Studio下编写NDK代码,实现获取三轴加速度的数值;
实验环境
- 硬件:CBT-EMB-MIP 实验平台,PC机,mini USB数据线;
- 软件: Android Studio 2.2 或更高版本, Android Plugin for Gradle 版本 2.2.0 或更高版本,CMake;
实验内容
- 编写NDK程序,实现获取三轴加速度的数值。
实验原理
IIC驱动体系
体系结构包括:IIC总线驱动;IIC核心;IIC从设备驱动。
- I2C核心
IIC 核心提供了IIC总线驱动和设备驱动的注册、注销方法,IIC通信方法(即“algorithm”),与具体适配器无关的代码以及探测设备、检测设备地址等。i2c-core.c中的核心驱动程序可管理多个IIC总线适配器(控制器)和多个IIC从设备。每个IIC从设备驱动都能找到和它相连的IIC总线适配器。
- IIC总线驱动
IIC总线驱动主要包括IIC适配器结构i2c_adapter和I2C适配器的algorithm数据结构。
通过IIC总线驱动的代码,可控制IIC适配器以主控方式产生开始位、停止位、读写周期,以及以从设备方式被读写、产生ACK等。
- IIC设备驱动
IIC设备驱动是对IIC设备端的实现,设备一般挂接在受CPU控制的I2C适配器上,通过IIC适配器与CPU交换数据。IIC设备驱动主要包括数据结构i2c_driver和i2c_client。
ADXL345驱动实现
IIC驱动体系中一般来说硬件上可含有一个或多个从设备,一个或多个适配器,这俩之间的关系:一个适配器可以控制多个从设备;且我们既可以通过直接编写从设备驱动来操控他,也可以通过操作适配器来操控从设备。
I2C总线的设备文件通常为/dev/i2c-n(n=0、1、2……),每个设备文件对应一组I2C总线。应用程序通过这些设备文件可以操作I2C总线上的任何从机器件。
本实例中ADXL345设备采用IIC总线驱动的方式。通过操作控制器来产生特定的IIC时序信号,来发送和接收数据,让适配器工作。
IIC编程接口
由于采用总线驱动方式,需调用i2c.h及i2c-dev.h这两个头文件。使用到的系统方法有:
/* This is the structure as used in the I2C_SMBUS ioctl call */
struct i2c_smbus_ioctl_data {
__u8 read_write;
__u8 command;
__u32 size;
union i2c_smbus_data __user *data;
};
/*
* Data for SMBus Messages
*/
#define I2C_SMBUS_BLOCK_MAX 32 /* As specified in SMBus standard */
union i2c_smbus_data {
__u8 byte;
__u16 word;
__u8 block[I2C_SMBUS_BLOCK_MAX + 2]; /* block[0] is used for length */
/* and one more for user-space compatibility */
};
- 打开设备
在操作I2C总线时,先调用open()函数打开I2C设备获得文件描述符,代码如下所示。
打开I2C设备文件
int fd;
fd = open("/dev/i2c-0", O_RDWR);
if (fd < 0) {
perror("open i2c-1 n");
}
- 关闭设备
当操作完成后,调用close()函数关闭设备:
close(fd);
- 配置设备
当应用程序操作I2C总线上的从机器件时,必须先调用ioctl()函数设置从机地址和从机地址的长度。
设置从机地址
设置从机地址是使用I2C_SLAVE命令,其定义为:
#define I2C_SLAVE 0x0703
该命令的参数为从机地址右移一位。设置从机地址为0xA0的示例代码为:
if (ioctl(GiFd, I2C_SLAVE, 0xA0>> 1)< 0) {
perror("set slave address failen");
}
注意:地址需要右移一位,是因为地址的Bit0是读写控制位,在驱动中会将从机地址命令参数左移一位,并补上读写控制位。
设置地址长度
设置从机地址的长度是使用I2C_TENBIT命令,其定义为:
#define I2C_TENBIT 0x0704
该命令的参数可选择为:1表示设置从机地址长度为10位;0表示设置从机地址长度为8位。设置从机地址长度为10位的示例代码为:
ioctl(fd, I2C_TENBIT, 1);
该命令是不会返回错误的。
如果不设置地址长度,则默认为8位地址。
- 发送/接收数据
通过调用系统方法ioctl传递不同参数args实现数据读写。
ioctl(file, I2C_SMBUS, &args);
封装函数如下:
static inline __s32 i2c_smbus_access(int file, char read_write, __u8 command,
int size, union i2c_smbus_data *data) {
struct i2c_smbus_ioctl_data args;
args.read_write = read_write;
args.command = command;
args.size = size;
args.data = data;
return ioctl(file, I2C_SMBUS, &args);
}
实验步骤
JNI中间层编程范例
从实验原理相关接口函数介绍,编写adxl345-jni.c代码参考如下:
#include <jni.h>
#include <fcntl.h>
#include <stdio.h>
#include <unistd.h>
//#include <linux/i2c-dev.h>
//#include <linux/i2c.h>
#include "android/log.h"
#include "i2c-dev.h"
#include "i2c.h"
static const char *TAG = "libs";
#define LOGI(fmt, args...) __android_log_print(ANDROID_LOG_INFO, TAG, fmt, ##args)
#define LOGD(fmt, args...) __android_log_print(ANDROID_LOG_DEBUG, TAG, fmt, ##args)
#define LOGE(fmt, args...) __android_log_print(ANDROID_LOG_ERROR, TAG, fmt, ##args)
#define DEVICE_NAME "/dev/i2c-0"
#define I2C_SLAVE 0x0703 /* Use this slave address */
#define I2C_TENBIT 0x0704
#ifndef uchar
#define uchar unsigned char
#endif
int fd, n, res;
unsigned char id;
unsigned char dataxh = 0;
unsigned char dataxl = 0;
unsigned char datayh = 0;
unsigned char datayl = 0;
unsigned char datazh = 0;
unsigned char datazl = 0;
unsigned int datax = 0;
unsigned int datay = 0;
unsigned int dataz = 0;
float x, y, z;
uchar set1_buffer[7] = {0x0B, 0x0B, 0x08, 0x80, 0x00, 0x00, 0x00}; ////adxl345设置
//参数
uchar reg1_buffer[7] = {0x31, 0x2c, 0x2d, 0x2e, 0x1e, 0x1f, 0x20};
static inline __s32 i2c_smbus_access(int file, char read_write, __u8 command,
int size, union i2c_smbus_data *data) {
struct i2c_smbus_ioctl_data args;
args.read_write = read_write;
args.command = command;
args.size = size;
args.data = data;
return ioctl(file, I2C_SMBUS, &args);
}
static inline __s32 i2c_smbus_read_byte_data(int file, __u8 command) {
union i2c_smbus_data data;
if (i2c_smbus_access(file, I2C_SMBUS_READ, command,
I2C_SMBUS_BYTE_DATA, &data)) {
printf("no data\n");
return -1;
}
else {
//printf("datatmp:%02x\n",data.byte);
return 0x0FF & data.byte;
}
}
static inline __s32 i2c_smbus_write_byte_data(int file, __u8 command,
__u8 value) {
union i2c_smbus_data data;
data.byte = value;
return i2c_smbus_access(file, I2C_SMBUS_WRITE, command,
I2C_SMBUS_BYTE_DATA, &data);
}
static int read_adxl345(int fd, __u8 buff[], int addr, int count) {
int res;
buff[0] = i2c_smbus_read_byte_data(fd, addr);
//res=read(fd,buff,count);
return res;
}
static int write_adxl345(int fd, __u8 data, int addr/*, int count*/) {
int i = i2c_smbus_write_byte_data(fd, addr, data);
if (i < 0)
printf("write error\n");
}
int toPrimary(unsigned int data) {
int temp = 0;
if (data & 0x8000) {
temp = data ^ 0xffff;
temp -= 1;
return temp * (-1);
}
else
temp = data;
// printf("temp:%02x\n",temp);
return temp;
}
JNIEXPORT jint JNICALL
Java_cbt_edu_iot_adxl345_MainActivity_adxl345Init(JNIEnv *env, jclass type) {
res = ioctl(fd, I2C_TENBIT, 0); //not 10bit
res = ioctl(fd, I2C_SLAVE, 0x53); //0x53为 ADXL345 IIC设备地址
write_adxl345(fd, *(set1_buffer + 0),
reg1_buffer[0]);//数据格式控制,禁用自测力>,中断高电平有效,全分辨率模式(正负16g,13 bit),右对齐并带符号扩展
write_adxl345(fd, *(set1_buffer + 1),
reg1_buffer[1]);//非低功耗模式,器件带宽为12.5Hz,输出数据速率为25Hz;(默认带宽50,速率100 )
write_adxl345(fd, *(set1_buffer + 2), reg1_buffer[2]);//静止功能和活动功能同时打开,禁止自动切换至休眠模式,测量模式,不休眠
write_adxl345(fd, *(set1_buffer + 3), reg1_buffer[3]);
write_adxl345(fd, *(set1_buffer + 4), reg1_buffer[4]);//X 偏移量
write_adxl345(fd, *(set1_buffer + 5), reg1_buffer[5]);//Y 偏移量
write_adxl345(fd, *(set1_buffer + 6), reg1_buffer[6]);//Z 偏移量
write_adxl345(fd, 0x4f, 0x38);
write_adxl345(fd, 0x00, 0x2e); //所有中断均关闭
write_adxl345(fd, 0x00, 0x2f); //INT1
write_adxl345(fd, 0x00, 0x28); //不使用FIFO
read_adxl345(fd, &id, 0x00, 1);
LOGI("adxl345 chip ID = %x \n", id);
}
JNIEXPORT jint JNICALL
Java_cbt_edu_iot_adxl345_MainActivity_adxl345_1open(JNIEnv *env, jclass type) {
fd = open(DEVICE_NAME, O_RDWR);//打开设备
if (fd == -1) {
LOGI("open device %s error \n", DEVICE_NAME);
return 0;
}
else {
LOGI("open device %s ok! \n", DEVICE_NAME);
return 1;
}
}
JNIEXPORT jfloat JNICALL
Java_cbt_edu_iot_adxl345_MainActivity_adxl345_1getAccel_1x(JNIEnv *env, jclass type) {
read_adxl345(fd, &dataxl, 0x32, 1);
read_adxl345(fd, &dataxh, 0x33, 1);
datax=dataxh*256+dataxl;
x=toPrimary(datax)*0.0039;
return x;
}
JNIEXPORT jfloat JNICALL
Java_cbt_edu_iot_adxl345_MainActivity_adxl345_1getAccel_1y(JNIEnv *env, jclass type) {
read_adxl345(fd, &datayl, 0x34, 1);
read_adxl345(fd, &datayh, 0x35, 1);
datay=datayh*256+datayl;
y=toPrimary(datay)*0.0039;
return y;
}
JNIEXPORT jfloat JNICALL
Java_cbt_edu_iot_adxl345_MainActivity_adxl345_1getAccel_1z(JNIEnv *env, jclass type) {
read_adxl345(fd, &datazl, 0x36, 1);
read_adxl345(fd, &datazh, 0x37, 1);
dataz=datazh*256+datazl;
z=toPrimary(dataz)*0.0039;
return z;
}
JNIEXPORT jint JNICALL
Java_cbt_edu_iot_adxl345_MainActivity_adxl345Exit(JNIEnv *env, jclass type) {
if (fd >= 0) {
close(fd);
fd = -1;
}
}
导入工程源码
- 打开Android Studio,从菜单栏选择 File > Open。
- 弹窗中浏览选择光盘src目录下的Gradle工程 CH04_NDK ,点击OK导入。
- 等待工程构建完成后,在工具栏中的Android App列表中选择本实验例程CH04_09_ADXL345。
演示运行
- 平台主板通过miniUSB线连接电脑后,点击 Run
 运行程序。
运行程序。 - 界面会显示当前多核心平台设备的三轴加速度实时数值,如图5.3.1所示:
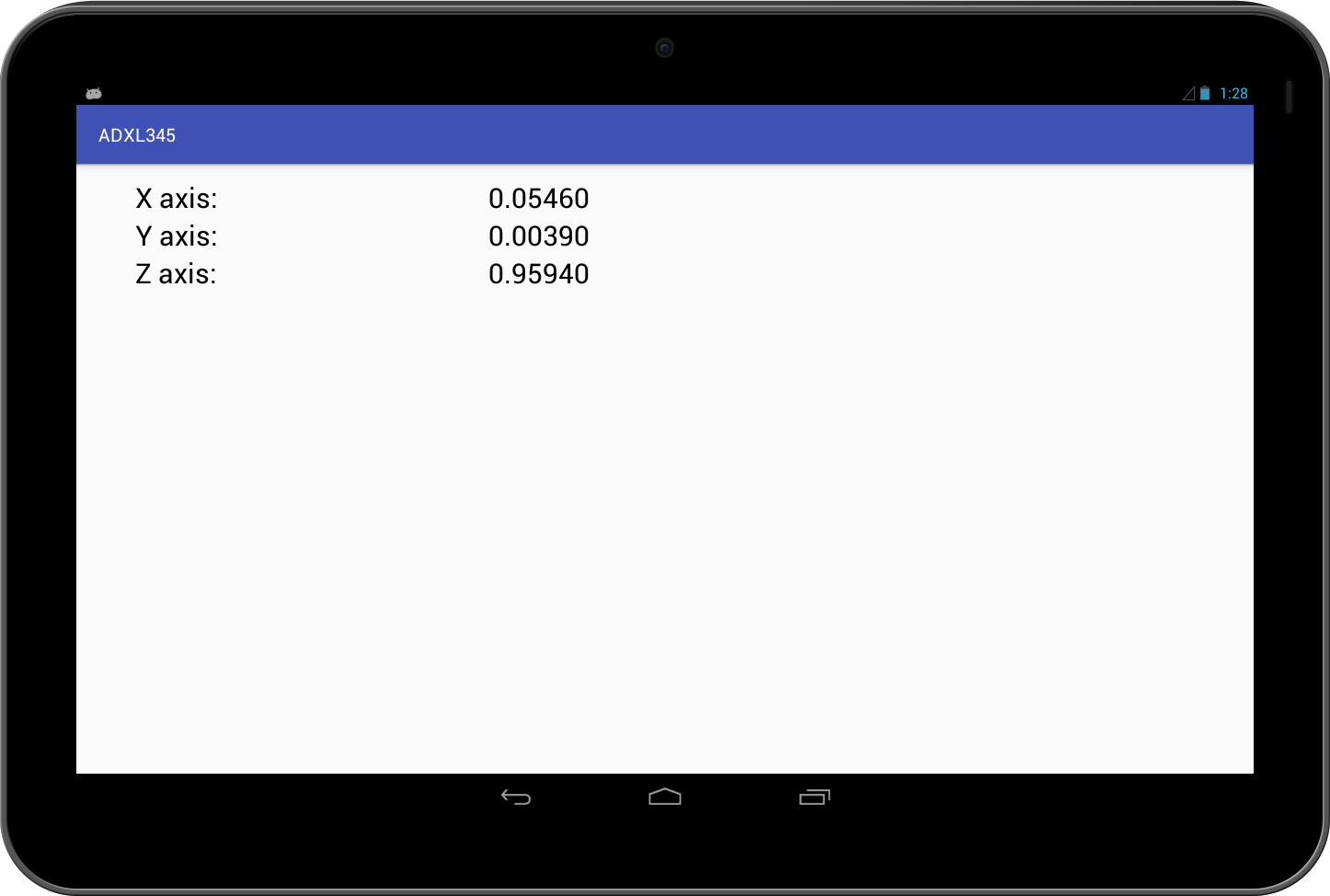
图5.3.1 主界面
- ADXL345用户手册中输出响应与相对于重力的方向的关系如图5.3.2所示:
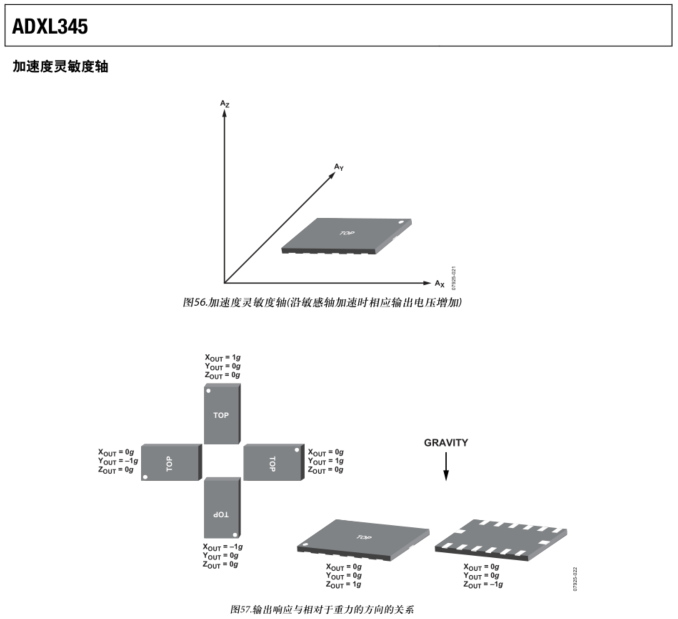
图5.3.2 输出响应与相对于重力的方向的关系